
Research News


Tracking Real-time Anomalies in Power Systems (TRAPS)
The researchers participating in this grant include Farshad Khorrami and Ramesh Karri, Professors of Electrical and Computer Engineering and member and director — respectively — of the NYU Center for Cybersecurity; and Research Scientist Prashanth Krishnamurthy.
A project to develop methods of securing the U.S. power grid from hackers, led by NYU Tandon researchers at the NYU Center for Cybersecurity, is one of six university teams receiving a portion of $12 million from the U.S. Department of Energy (DOE), supporting research, development, and demonstration (RD&D) of novel cybersecurity technologies to help the U.S. power grid survive and recover quickly from cyberattacks.
The Tandon team received $1.94 million for the project from the DOE fund, with matching support from NYU bringing the total to around $2.8 million, to develop Tracking Real-time Anomalies in Power Systems (TRAPS) to detect and localize anomalies in power grid cyber-physical systems. Collaborators include SRI International, the New York Power Authority, and Consolidated Edison. TRAPS will correlate time series measurements from electrical signals, embedded computing devices, and network communications to detect anomalies using semantic mismatches between measurements, allowing it to perform cross-domain real-time integrity verification.
Administered by the DOE's Office of Cybersecurity, Energy Security, and Emergency Response (CESER), the strategic project aims to advance anomaly detection, artificial intelligence and machine learning, and physics-based analytics to strengthen the security of next-generation energy systems. These systems include components placed in substations to detect cyber intrusions more quickly and automatically block access to control functions.
The program aligns with the DOE’s larger goal of bolstering the security and resiliency of the power grid toward advancing President Biden’s goal of a 100% clean electrical grid by 2035 and net-zero carbon emissions by 2050.
Collaborative Research: Modeling and Control of Non-Passive Networks with Distributed Time-Delays: Application in Epidemic Control
S. Farokh Atashzar, assistant professor of electrical and computer engineering at NYU Tandon and member of the Center for Urban Science and Progress (CUSP), has received a major NSF award (~$400K) to conduct fundamental research on the control of networked dynamic systems in the presence of distributed delays.
The COVID pandemic, an example of large-scale disease propagation, can be seen as a "mega-network" where complex interactions and distributed delays in the interconnections lead to hard-to-predict, echoing “waves” of disease spread. S. Farokh Atashzar, with the support of a collaborative National Science Foundation Civil, Mechanical and Manufacturing Innovation (NSF CMMI) grant, and in collaboration with Northeastern University, will dive into these "waves" by developing novel approaches to computational network modeling and designing optimal mitigation control to minimize the spread.
This research seeks to develop a comprehensive framework for data-driven control of large-scale networks where time delays and complex behavior play an important role. In the COVID pandemic, such effects lead to ``reflective" spreading waves, resulting in hard to predict and control phases of infection spread. But accurate network models of society and disease spread are necessary to enhancing pandemic preparedness and making healthcare systems and governments ready to respond well to potential future airborne epidemic diseases.
Effective mitigation of pandemics spread over networks requires: (a) unveiling the topology, dynamics, and delays of the underlying network from experimental data; (b) using this information to design networks that can robustly minimize the systemic effects of localized infection foci; and (c) synthesizing real-time optimal control laws that adjust local parameters to prevent the onset of delay-induced echoing waves of pandemic spread. This research seeks to achieve these objectives by embedding the problem into a more general one: data-driven control synthesis, based on nonlinear passivity control theory, for networked systems in the presence of delay-induced non-minimum phase/non-passive behavior.
Atashzar is also with NYU Center for Urban Science and Progress (CUSP). The project will promote health-related engineering science, research, and education for students from NYU CUSP and NYU Tandon.
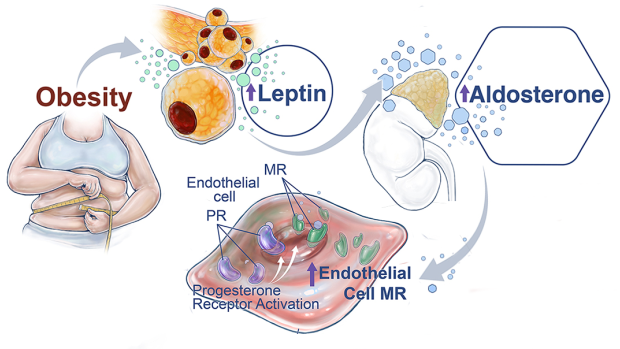
Sparse system identification of leptin dynamics in women with obesity
This research included Rose T. Faghih, Associate Professor of Biomedical Engineering at NYU Tandon, and researchers from the University of Houston, the Louis Bolk Instituut, and the Weill Institute for Neurosciences.
According to the CDC, obesity prevalence in the United States was 42.4 percent in 2017–2018. Obesity prevalence in the United States climbed from 30.5 percent to 42.4 percent between 1999 and 2018. Obesity has been linked to cardiovascular disease, stroke, Type 2 diabetes, and a variety of malignancies. These are some of the most common causes of death that can be avoided. In 2008, the yearly medical cost of obesity in the United States was estimated to reach $147 billion.
It is important to understand the root cause of obesity in terms of hormonal imbalance. To regulate food intake, the brain responds to signals from fat (adipose) tissue, the pancreas, and the digestive tract. These instructions are transmitted via hormones like leptin, insulin, and ghrelin, as well as other small molecules. Among them, leptin is a signaling hormone that is essential to signal the brain in the suppression of appetite. It regulates food intake, metabolism, energy expenditure, and body weight. Thus, leptin regulation is known to be closely related to diseased conditions such as obesity.
In a new study from researchers at NYU Tandon and other schools, the group analyzed the behavior of two neuroendocrine hormones, leptin and cortisol (a stress hormone), in a cohort of patients with obesity. They used a system theoretic approach that can accurately estimate the internal secretion patterns, timings, amplitudes, number of underlying hormone secretory pulses, infusion, and clearance rates of hormones in patients with obesity by only measuring the 24-hour blood assay of their hormones.
The findings suggest a method for mathematically modeling both leptin and cortisol hormones to characterize how they interact as part of a larger system. Because the relationship between leptin and cortisol hormones is complex, the new results and projections will help us understand how these hormones work together to keep the body in a state of homeostasis.
The researchers demonstrated a negative relation between leptin and cortisol secretion, based on a statistical test called the Granger causality test among the patients with obesity. These results indicate that increases in cortisol are prospectively associated with reductions in leptin, suggesting a negative inhibitory relationship in 14 out 18 obese women investigated. Reduced leptin may result in a decrease in satiety and thereby lead to obesity
The model can be a crucial contribution toward the potential development of the next generation of agile closed-loop medical systems related to obesity. Such next-generation closed-loop medical systems will identify deviations from homeostasis and suggest necessary interventions benefiting from regular tracking of hormone secretory events and underlying endocrinological system parameters. This way complex conditions such as obesity can be prevented at the root level resulting in an overall increase in the quality of life and reduction in the total national medical expenditure.

Monitoring SARS-CoV-2 in wastwater during NYC’s second wave of COVID-19: sewershed level trends and relationships to publicly available clinical testing data
Collaborators in this research, whose corresponding author is Andrea Silverman, Assistant Professor of Civil and Urban Engineering and a member of the Center for Urban Science and Progress at NYU Tandon, include Catherine Hoar, a postdoctoral researcher at NYU Tandon; and investigators at the New York City Department of Environmental Protection; Queens College of the City University of New York (CUNY); the CUNY Graduate Center; CUNY Queensborough Community College; and the Eugene Lang College of The New School.
In response to the COVID-19 pandemic, the New York City Department of Environmental Protection (NYC DEP) partnered with academic institutions, including NYU Tandon, to launch a wastewater monitoring program with the goal of tracking concentrations of SARS-CoV-2 in wastewater from the city’s 14 sewersheds. Cities like New York established such wastewater-based epidemiology (WBE) programs on the premise that viral particles of SARS-CoV-2, the virus causing COVID-19, are excreted by infected individuals into the sewer system. Such WBE data can provide community-level information that is not biased by rates of clinical testing, which may vary in different communities or at different times throughout the pandemic.
New research, led by Andrea Silverman, assistant professor of environmental engineering, and Catherine Hoar, a postdoctoral researcher under Silverman’s supervision, presents insights from the development of this monitoring program and explores the extent to which trends in SARS-CoV-2 concentrations in wastewater reflect trends in COVID-19 cases confirmed from clinical testing in NYC communities.
To assess the relationship between the concentration of SARS-CoV-2 in the city’s sewersheds and confirmed cases of COVID-19 in the communities served by those sewersheds, the researchers analyzed samples of raw wastewater entering each of NYC’s 14 wastewater treatment facilities every week during the City’s second wave of the COVID-19 outbreak, beginning in in August 2020. They then compared viral load data they’d gathered from wastewater samples to publicly available case data provided by the NYC Department of Health and Mental Hygiene (DOHMH).
In correlating the wastewater and clinical data sets for each sewershed, they found that SARS-CoV-2 viral loads in wastewater corresponded to new laboratory-confirmed COVID-19 cases in the corresponding populations for all individual sewersheds: an increase in COVID-19 cases was associated with an increase in SARS-CoV-2 concentrations in wastewater. The researchers also used this analysis to estimate the minimum number of new COVID-19 cases per day that was associated with detection of SARS-CoV-2 in wastewater with the monitoring methodology they applied.
Broadly, the researchers concluded that relative trends in SARS-CoV-2 loads in wastewater can be evaluated and associated with trends in clinical testing data, and therefore can potentially contribute to situational awareness of disease incidence in large urban sewersheds. The data from this work is publicly available via the NYC Open Data portal and the United States Center for Disease Control and Prevention’s wastewater surveillance data dashboard. As the COVID-19 pandemic continues and evolves, Dr. Silverman and Dr. Hoar continue to partner with and advise the NYC DEP in their ongoing COVID-19 WBE program.
The research was supported by he New York City Department of Environmental Protection (NYC DEP), and the Alfred P. Sloan Foundation.
Inequitable access to EV charging infrastructure
This research was led by Yury Dvorkin, professor of electrical and computer engineering, and member of the C2SMART Tier 1 Transportation Center at NYU Tandon; and included Hafiz Anwar Ullah Khan and Sara Price, Ph.D. and M.S. candidates, respectively, under Dvorkin's guidance; and post-doctoral researcher Charalampos Avraam.
Electrified transportation is one of the critical aspects of the global trend towards decarbonization. However barriers to consumer adoption of EVs by the public exist. Principally, they are access to, and affordability of electric vehicle (EV) charging infrastructure. The latter concern is lessening as light-duty electric vehicle (EV) prices rapidly declining to as low as $18,875 after federal tax credits and state rebates and their ranges increase with battery and drivetrain improvements.
To address charging availability major efforts are underway in the United States to roll-out public EV charging infrastructure. But persistent social disparities in EV adoption call for interventions.
In a paper, the investigators led by Yury Dvorkin, analyzed existing EV charging infrastructure across New York City (NYC) to identify features that correlate with the current distribution of EV charging stations. They found that population density is not correlated with the density of EV chargers, hindering New York’s EV adoption and decarbonization goals.
To determine the socio-demographic and transportation factors affecting the distribution of EV charging stations in NYC, they used the publicly available Alternative Fuel Station Locator dataset from Alternative Fuel Data Centre at the US Department of Energy. This dataset provides a current accounting of the types and locations of all alternative fuel stations in NYC.
Based on correlation analysis, hypothesis testing, and conditional analysis, the results demonstrate that the availability and affordability of EV charging stations in NYC are not determined by the population density, but are correlated with the median household income, percentage of White–identifying population, and presence of highways in a zip code, with the distribution of EV charging stations heavily skewed against low–income, Black–identifying, and disinvested neighborhoods in NYC.
The results underscore the need for policy frameworks that incorporate equity and justice in the roll-out of EV charging infrastructure.
True or false: studying work practices of professional fact-checkers
This research included Nasir Memon of NYU Tandon and the NYU Center for Cybersecurity, Nicholas Micallef of the NYU Abu Dhabi Center for Cyber Security, and researchers from Indiana University Bloomington and the University of Utah.
Online misinformation is a critical societal threat . While fact-checking plays a role in combating the exponential rise of misinformation, little empirical research has been done on the work practices of professional fact-checkers and fact-checking organizations.
Existing research has covered fact-checking practitioner views, effectiveness of fact checking efforts, and professional and user practices for responding to political claims. While researchers are beginning to investigate challenges to fact-checking, such efforts typically focus on traditional media outlets rather than independent fact-checking organizations (e.g., Politifact). Similarly, such research has not yet investigated the entire misinformation landscape, including the dissemination of the outcomes of fact-checking work.
To address these shortcomings, a team including Nasir Memon of NYU Tandon and Nicholas Micalleff of NYU Abu Dhabi interviewed 21 professional fact-checkers from 19 countries, covering topics drawn from previous research analyzing fact-checking from a journalistic perspective. The interviews focused on gathering information about the fact-checking profession, fact-checking processes and methods, the use of computation tools for fact-checking, and challenges and barriers to fact-checking.
The study, "True or False: Studying the Work Practices of Professional Fact-Checkers," found that most of the fact-checkers felt they have a social responsibility of correcting harmful information to provide “a service to the public,” emphasizing that they want the outcome of their work to both educate and inform the public. Some fact-checkers mentioned that they hope to contribute to an information ecosystem providing a “balanced battlefield” for the discussion of an issue, particularly during elections.
The interviews also revealed that the fact-checking process involves first selecting a claim, contextualizing and analyzing it, consulting data and domain experts, writing up the results and deciding on a rating, and disseminating the report.
Fact-checkers encounter several challenges in achieving their desired impact because current fact-checking work practices are largely manual, ad-hoc, and limited in scale, scope, and reach. As a result, the rate at which misinformation can be fact-checked is much slower than the speed at which it is generated. The research points out the need for unified and collaborative computational tools that empower the human fact-checker in the loop by supporting the entire pipeline of fact-checking work practices from claim selection to outcome dissemination. Such tools could help narrow the gap between misinformation generation and fact-check dissemination by improving the effectiveness, efficiency, and scale of fact-checking work and dissemination of its outcomes.
This research has been supported by New York University Abu Dhabi and Indiana University Bloomington.
Developing design criteria for active green wall bioremediation performance
This research was led by Elizabeth Hénaff, Assistant Professor in the Department of Technology, Culture, and Society department with collaborators from Yale University.
Air pollution “is the biggest environmental risk to [human] health” according to the World Health Organization. While air-pollution related deaths are strongly associated with a person’s age and their country of origin’s economic status, poor indoor air quality correlates to health impacts ranging from transient symptoms such as difficulty concentrating and headaches, to chronic, more serious symptoms such as asthma and cancer, in both developing and developed nations.
Emerging data indicates that mechanical/physio-chemical air handling systems inadequately address common indoor air quality problems, including elevated CO2 levels and volatile organic compounds (VOCs), with compounding negative impacts to human health. In this new study, the researchers extend Hénaff's preliminary work suggesting that active plant-based systems may address these challenges.
The researchers investigated relationships between plant species choice, growth media design (hydroponic versus organic), and factors of design-related performance such as weight, water content, and air flow rate through growth media. The team studied these variables in relation to CO2 flux under low levels of light such as one might find in indoor lighting environments. The proposed methodology was designed to improve upon the methods of previous studies.
Across the species, hydroponic media produced 61% greater photosynthetic leaf area compared to organic media which produced 66% more root biomass. The investigators measured CO2 concentration changes driven by differing plant and growth media (organic vs. hydroponic) treatments within a semi-sealed chamber.
The results of this experiment point to two critical considerations: First, growth media selection should be considered a primary design criterion, with potentially significant implications for the ultimate CO2 balance and biological function of installations, especially as it relates to patterns of plant development and water availability. Secondly, influxes of CO2 concentrations during the initiation of active air flow and early plant development may have to be accounted for if the patterns of measured CO2 fluxes are found to persist at scale. In the context of active air flow systems and indoor air pollutant bioremediation (CO2 included), relative rates of CO2 production and sequestration as they relate to potential VOC remediation rates become critical for short term indoor air quality and implications for heating, ventilation and A.C. energy use.
Phoebe Mankiewicz, Aleca Borsuk, Christina Ciardullo, Elizabeth Hénaff, Anna Dyson; Developing design criteria for active green wall bioremediation performance: Growth media selection shapes plant physiology, water and air flow patterns; Energy and Buildings; Volume 260, 2022
Stochastic modeling of solar irradiance during hurricanes
Authors of this research, led by Luis Ceferino, professor of civil and urban engineering and member of the Center for Urban Science and Progress, include Ning Lin and Dazhi Xi of Princeton University.
Despite solar’s growing criticality for electricity generation, few studies have proposed models to assess solar generation during extreme natural events. In particular, hurricanes bring environmental conditions that may drastically reduce solar generation even if solar infrastructure remains fully functional.
In a new paper in researchers present a stochastic model to quantify irradiance decay during hurricanes, using a dataset that analyzes historical data on Global Horizontal Irradiance and 22 landfalling storms from the Atlantic in the North American basin, which reached a category of at least three during their lifetime. The data showed higher irradiance decays for higher hurricane categories and closer to the hurricane center due to optically thick clouds that absorb and reflect light.
Specifically, their model describes the irradiance decay as a function of hurricane category and the distance to the hurricane center normalized by the hurricane size. Their analysis, based on an examination and performance ranking of four irradiance decay functions with varying complexities, demonstrates that the hurricane’s radius of outermost closed isobar performs best as the size metric for normalizing distance.
To showcase the methodology’s applicability, they used it to generate spatiotemporal models of irradiance during storms from genesis to dissipation, based on probable storm behavior in 839 counties in the United States’ southern region. Among the results were that solar-powered electricity generation in Miami-Dade, Florida, can decrease beyond 70% in large regions during a category-4 hurricane even if the solar infrastructure is undamaged.
They found that, furthermore, generation losses can also last beyond three days, and this timeframe will be exacerbated if solar panels become non-functional. The team plans a follow-up study integrating the proposed model with panel fragility functions to offer analysis capabilities for forecasting time-varying solar generation during hurricanes.
A chance-constrained dial-a-ride problem with utility-maximising demand and multiple pricing structures
The classic Dial-A-Ride Problem (DARP) aims at designing the minimum-cost routing that accommodates a set of user requests under constraints at an operations planning level, where users’ preferences and revenue management are often overlooked.
Researchers at NYU Tandon, including Joseph Chow, professor of civil and urban engineering and Deputy Director of the C2SMART Tier 1 University Transportation Center, have designed innovative solutions. In a paper in Elsevier’s Transportation Research, they present a mechanism for accepting and rejecting user requests in a Demand Responsive Transportation (DRT) context based on the representative utilities of alternative transportation modes. They consider utility-maximising users and propose a mixed-integer programming formulation for a Chance Constrained DARP (CC-DARP), that captures users’ preferences.
They further introduce class-based user groups and consider various pricing structures for DRT services, and develop a local search-based heuristic and a matheuristic to solve the proposed CC-DARP. The study includes numerical results for both DARP benchmarking instances and a realistic case study based on New York City yellow taxi trip data. They found, with computational experiments performed on 105 benchmarking instances with up to 96 nodes yielded average profit gaps of 2.59% and 0.17% using the proposed local search heuristic and matheuristic, respectively.
The based on the case study the work suggests that a zonal fare structure is the best strategy in terms of optimizing revenue and ridership. Their CC-DARP formulation provides a new decision-support tool to inform revenue and fleet management for DRT systems on a strategic planning level.
Co-authors of the study are Xiaotong Dong and Travis Waller of the School of Civil and Environmental Engineering, University of New South Wales, Australia; and David Rey of the SKEMA Business School, Université Côte d’Azur, France.
Transit Network Frequency Setting With Multi-Agent Simulation to Capture Activity-Based Mode Substitution
Despite the emergence of many new mobility options in cities around the world, fixed route transit is still the most efficient means of mass transport. Bus operations are subject to vicious and virtuous cycles. Evidence of this can be seen in New York City.
Since 2007, travel speed reductions and increased congestion as a result of more mobility options competing for road space have led to a vicious cycle of ridership reduction and further increased congestion as former transit passengers take to other less congestion-efficient modes. In Brooklyn, bus ridership has declined by 21% during this period. While the decrease in ridership has been steady throughout this period, there is an emerging concern that it will only get worse as for-hire vehicle services like Uber and Lyft add more trips to the road network
Intervention in the form of network redesign is required to promote a virtuous cycle and make the bus more competitive, especially in the face of increased competition from ride-hail services. This can be done by redesigning the bus network in a way that reduces operating and user costs while increasing accessibility for more riders.
Now, new research from Joseph Chow, professor of computer science and engineering at the NYU Tandon School of Engineering and a member of the C2SMART Tier 1 University Transportation Center at NYU Tandon; and doctoral student Ziyi Ma are proposing a simulation-based transit network design model for bus frequency planning in large-scale transportation networks with activity-based behavioral responses. The model is applied to evaluate the existing Brooklyn bus network, other proposed network redesign, and used to develop an alternative design based on the researcher’s methodology.
The MATSim-NYC model designed by Chow and Ma is able to simulate patterns similar to the existing bus network in Brooklyn with some calibration. This model was used to confirm a plan from another group to increase ridership, but was also able to refine it even further. The increased ridership draws primarily from passenger car use (nearly 75%), with a small 2.5% drawn from ride-hail services and another 5% from taxis. This suggests the redesigns should be effective in moving people away from less efficient transportation modes.
The researchers are now looking to further refine their model so that it can become a key tool for policymakers planning the future of transportation in the city.