
Labs and Groups
We are home to dozens of research labs and groups, where engineering researchers are bridging disciplines in state-of-the-art facilities.

AI4CE Lab
The AI4CE Lab aims to advance Robotics and AI in areas such as localization, mapping, navigation, mobile manipulation, and scene understanding to address infrastructure challenges on Earth and beyond, including construction robotics, manufacturing automation, and autonomous vehicles.

Applied Dynamics and Optimization Laboratory
We aim to establish mathematical models, quantitative criteria, and algorithmic/computational foundations toward their implementations in robotics (for design and control), biomechanical systems (for prediction and analysis), and their intersections such as lower-body wearable robots.

Biomechatronics and Intelligent Robotics Lab
Research focuses on innovative robotic technologies to assist people in areas like walking, surgery, and rehabilitation. Sample projects include a reinforcement learning-powered exoskeleton that reduces human energy use, a versatile catheter robot for safer surgeries, and MRI-guided robots to improve prostate cancer biopsies.

Control and Network (CAN) Lab
The CAN Lab, led by Professor Zhong-Ping Jiang, develops fundamental principles and tools for the stability analysis and control of nonlinear dynamical networks, with applications to information, mechanical, and biological systems.

Control/Robotics Research Laboratory (CRRL)
CCRL conducts research projects on unmanned vehicles, autonomy and navigation, control systems, cyber-security, and machine learning.

Dynamical Systems Laboratory (DSL)
Professor Maurizio Porfiri’s group conducts multidisciplinary research in the theory and application of dynamical systems, motivated by the objectives of advancing engineering science and improving society. Their theoretical expertise is in controls, networks, nonlinear dynamics, and time-series, while our application domain is in modeling and analysis of physical, social, and technical systems.

Machines in Motion
We try to understand the fundamental principles for robot locomotion and manipulation that will endow robots with the robustness and adaptability necessary to efficiently and autonomously act in an unknown and changing environment.

Mechatronics, Controls, and Robotics Lab
The lab provides undergraduate and graduate students a real-world, hands-on experience in modern DSP- and PC- based data acquisition and real-time control.
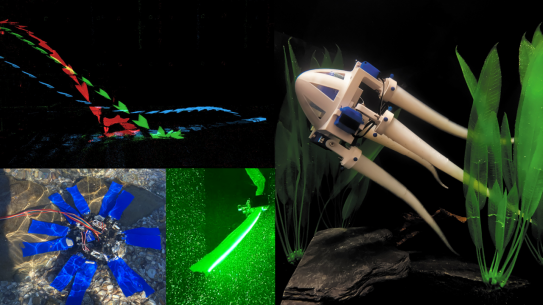
Prema Lab
The Prema Lab led by Prof. Obayashi designs physically intelligent robots and methodologies enabling co-adaptation between technology and nature. We develop soft robots and large-scale automation to exploit fluids and complex environments. Our research integrates novel design, fluid analysis, and data-driven methods to achieve robust, efficient behaviors in the physical world.
Riviere Robot Lab
The Riviere Robot Lab (RRL) develops autonomous robotics research with theory, software, and experiments. Our methods are at the intersection of machine learning, discrete and continuous optimization, dynamical systems, and hardware systems.