
Steady does it
NYU Tandon professor and his students put forth a framework for predicting robotic stability

Like toddlers, bipedal robots are inherently unstable. Sometimes the problem comes from the terrain it is navigating: is it uneven or rocky? Sometimes the robot itself has insufficient control or an unwieldy design. Other times, outside interactions are a factor: a legged robot that is pushed hard enough will inevitably topple.
Associate Professor of Mechanical and Aerospace Engineering Joo H. Kim, who heads Tandon’s Applied Dynamics and Optimization Laboratory, and his team of graduate student researchers have introduced an algorithmic framework that can estimate the balance stability states of a biped system and used it to demonstrate walking and push recovery control.
The goal, he explains, is to know if a robot is well-balanced enough, discovering that in advance computationally, rather than out in the field, where a toppling robot could do damage to itself or its surroundings. “We introduced comprehensive and univocal definitions of the stability states of a generic legged system with respect to its contact with the environment,” he explained. “And we established theoretical models of joint-space and center of mass (COM)-space dynamics for a full-body system under the distribution of multiple contact wrenches for their integration into optimization problems.”
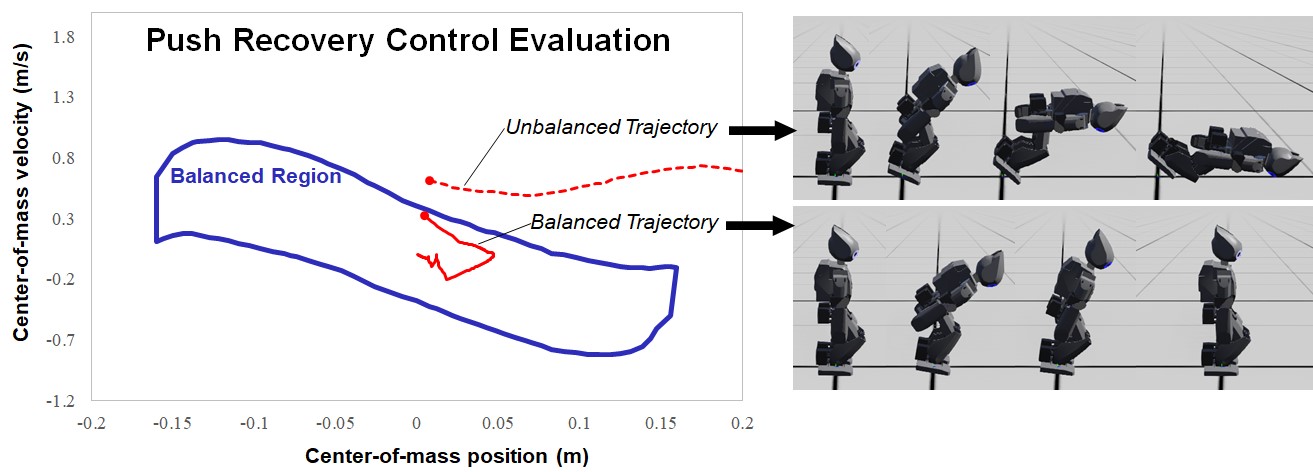
That approach allows his group to quantitatively evaluate the effects of joint strategies and step contact configurations on the system’s balance stability capabilities for push recovery control, and undertake comparative analysis to address the principle of bipedal walking from a balance-stability perspective. Specifically, the results provide a quantitative and rigorous characterization of the relatively conservative and careful walking style of many current humanoid robots — in contrast to the more dynamic walking of unimpaired humans. (The human gait, he says, relies heavily on gravity and is thus mostly unbalanced but energy-efficient.)
Kim’s framework can also be used to evaluate walking control strategies for wearable robots, such as the exoskeletons he is known for working with, but there are other possible applications. “We see older people or those recovering from injuries with similar gait issues,” he says. “This could be a mathematical way to predict how likely it is that they will suffer a fall.”


