
AI-Powered Wearable and Surgical Robots for Human Augmentation

Speaker:
Hao Su, PhD
Associate Professor, Dept. of Biomedical Engineering
NYU Tandon School of Engineering
Abstract:
Wearable and surgical robots can assist human capabilities, but their progress has been constrained by two persistent challenges: they are often bulky and confined to lab settings, and they struggle to adapt to unseen scenarios. This talk presents innovations that address these challenges through advances in hardware and algorithms. On the hardware side, I will introduce high-torque density motors that electrify robotic actuation, enabling compact and lightweight medical robots. On the algorithmic side, I will highlight our paper published in Nature on a physics-informed, data-driven learning-in-simulation framework, combined with deep reinforcement learning, that creates adaptive controllers without intensive human experiments and directly overcomes the data scarcity problem that limits many AI methods. Unlike supervised learning, which mimics demonstrations, this approach uses physics-informed reinforcement learning to create novel control policies that generalize to new scenarios. By integrating these two advances, we move beyond lab prototypes toward versatile, real-world robotic systems that make human movement easier, surgery safer, and robotics more accessible.
Bio: Dr. Hao Su is an Associate Professor at New York University and Director of the Biomechatronicsand Intelligent Robotics Lab. He previously served as a faculty member at North Carolina State University and the University of North Carolina at Chapel Hill. He is a recipient of the NSF CAREER Award, the Switzer Distinguished Fellowship from the U.S. Department of Health and Human Services, Toyota Mobility Challenge Discover Award, the Best Medical Robotics Paper Award at IEEE International Conference on Robotics and Automation (ICRA), and the Best Paper Award from the ASME Dynamic Systems and Control Division. His research has been published in leading journals including Nature, Science Robotics, Nature Machine Intelligence, Science Advances, and IEEE Transactions on Robotics. Dr. Su serves as Technical Editor of the IEEE/ASME Transactions on Mechatronics, Associate Editor of the IEEE Robotics and Automation Magazine and the ASME Journal of Mechanisms and Robotics, and on the Editorial Advisory Board of the International Journal of Medical Robotics and Computer-Assisted Surgery. He has also held leadership roles at major IEEE conferences and is a keynote speaker at the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). He holds multiple patents in surgical robotics, wearable robots, and socially assistive robotics.
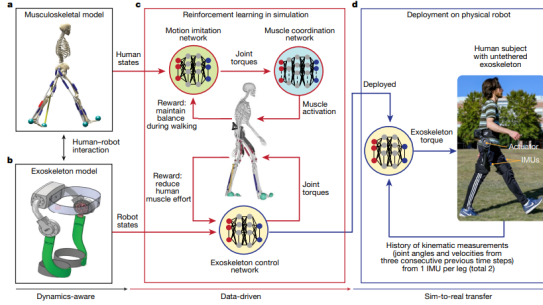
S. Luo, M. Jiang, S. Zhang, J. Zhu, S. Yu, I. Dominguez Silva, T. Wang, E. Rouse, B. Zhou, H. Yuk, X. Zhou, and H. Su, “Experiment-free exoskeleton assistance via learning in simulation,” Nature, vol. 630, no. 8016, pp. 353–359, Jun. 2024
