Vikram Kapila
-
Director, Ph.D. Hub
-
Professor Mechanical and Aerospace Engineering
Education
Regional Engineering College, Calicut, India
Bachelor of Technology
Florida Institute of Technology
Master of Science
Georgia Institute of Technology
Doctor of Philosophy
Experience
Polytechnic Institute of New York University, April 2011 to present
Professor
Instruction in graduate and undergraduate system dynamics and control courses and development of externally funded research program in robust control.
Machine Tools, Progressive Spark Systems Private Limited, India, October 1988 to September 1989
Project Engineer
Developed machine tool hardware for electro-discharge machines (EDM) and CNC wire EDM.
Production, Rajinder Pipes and Leasings Limited, India, October 1989 to February 1990
Trainee Engineer
Developed production tools for electrical resistance welding (ERW) tubes and supervised shift production.
Florida Institute of Technology, September 1991 to December 1993
Graduate Teaching Assistant
Undergraduate instruction in Statics, Dynamics, and Materials Laboratory. Conducted research to develop periodic and multirate control algorithms.
Georgia Institute of Technology, January 1994 to January 1996
Graduate Research Assistant
Conducted research to develop robust controller analysis and synthesis tools for uncertain systems.
Georgia Institute of Technology, January 1996 to January 1996
Graduate Teaching Assistant
Undergraduate laboratory instruction in Flight Mechanics and Control.
Georgia Institute of Technology, March 1996 to June 1996
Adjunct Faculty
Undergraduate instruction in Vibrations and System Dynamics.
Georgia Institute of Technology, January 1996 to August 1996
Research Associate
Developed theoretical and computational tools for robust fixed-order controller synthesis.
Polytechnic Institute of New York, September 1996 to August 2002
Research Associate
Instruction in graduate and undergraduate system dynamics and control courses and development of externally funded research program in robust control.
Polytechnic Institute of New York, September 2002 to April 2011
Associate Professor
Instruction in graduate and undergraduate system dynamics and control courses and development of externally funded research program in robust control.
Publications
Journal Articles
- K. Williams, I. Igel, R. Poveda, V. Kapila, and M. Iskander, “Enriching K-12 Science and Mathematics Education Using LEGOs,” Advances in Engineering Education, Vol. 3, No. 2, summer 2012.
- C. Dubey and V. Kapila, “Wave Fractal Dimension as a Tool in Detecting Cracks in Beam Structures,” Chaotic Modeling and Simulation (CMSIM), 1: 241—256, 2012.
- M. Iskander and V. Kapila, “Revitalizing Achievement by Using Instrumentation in Science Education (RAISE), A GK-12 Fellows Project,” Journal of Professional Issues in Engineering Education and Practice, Vol. 138, 62—72, 2012.
- I. Igel, R. Poveda, V. Kapila, and M. Iskander, “Examining the Efficacy of a LEGO Robotics Training for Volunteer Mentors and K-12 Teachers,” Proc. Amer. Soc. Eng. Ed., Session: W146A, San Antonio, TX, June 2012.
- A. Faisal, V. Kapila, and M. Iskander, “Using Robotics to Promote Learning in Elementary Grades,” Proc. Amer. Soc. Eng. Ed., June 2012, Session: T446, San Antonio, TX, June 2012.
- C. Dubey and V. Kapila, “Detection and Characterization of Cracks in Beams via Chaotic Excitation and Statistical Analysis,” in Application of Chaos and Nonlinear Dynamics in Engineering, S. Banerjee, M. Mitra, and L. Rondoni (Eds.), 137—164. Berlin: Springer-Verlag, 2011, ISBN-10: 3642219217.
- C. Dubey, H. Wong, V. Kapila, and P. Kumar, “Web-Enabled Remote Control Laboratory Using an Embedded Ethernet Microcontroller,” in Internet Accessible Remote Laboratories: Scalable E-learning Tools for Engineering and Science Disciplines, A.K.M. Azad, M.E. Auer, and V.J. Harward (Eds.), 338—361, IGI Global, USA, 2011, DOI: 10.4018/978-1-61350-186-3.
- N. Abaid, C. Yuvienco, V. Kapila, and M. Iskander, “Mechatronics Mania at the Inaugural USA Science and Engineering Festival,” IEEE Control Systems Magazine, Vol. 31, 105—110, 124, 2011.
- S.-H. Lee, V. Kapila, M. Porfiri, and A. Panda, “Master-Slave Synchronization of Continuously and Intermittently Coupled Sampled-Data Chaotic Oscillators,” Communications in Nonlinear Science and Numerical Simulation, Vol. 15, 4100—4113, 2010.
- I. Ahmed, H. Wong, and V. Kapila, “Internet-Based Remote Control using a Microcontroller and an Embedded Ethernet Board,” ASEE Computers in Education Journal, Vol. I, 15—21, 2010.
Awards
- Received NYU-Poly’s leadership award (2012), Jacobs Excellence in Education Award (2011, 2008, 2002), and the Distinguished Teacher Award (2003).
- Invited to the U.S. National Science and Engineering Expo, Washington, DC, April 27—29, 2012. Our showcase “Mobile Apps for Robotics,” was one of only 16 NSF-funded research and education projects selected by NSF to be featured at the event.
- Awarded the 2011 Outstanding Project Award for Efforts in Sustainability and Media by the National Science Foundation at the GK-12 Fellows Project Annual Meeting, Washington, DC, March 13, 2011.
- Invited to the U.S. National Science and Engineering Expo, Washington, DC, October 23—24, 2010. Our showcase “Mechatronics Mania,” was one of only 15 NSF-funded research and education projects selected by NSF to be featured at the event.
- Selected for a three-year term as a Senior Faculty Fellow of NYU-Poly’s Othmer Institute for Interdisciplinary Studies (Fall 2004—Summer 2007).
- Presented an invited Plenary Lecture titled “Hands-on Mechatronics Education: A Brooklyn Poly Perspective,” at the 17th Florida Conference on the Recent Advances in Robotics held at the University of Central, Orlando, FL, May 2004.
- Inducted as an eminent engineer in Tau Beta Pi, The Engineering Honor Society, upon invitation from student members of Polytechnic chapter, the NY Rho (November 2003).
Information for Mentees
I have been at our school since 1996 and served in various shared-governance roles, including Speaker of the Faculty, Chair of the Tenure Committee, etc. I collaborate with colleagues at other NYU schools in research and committee work. I support Professional Development Programming for Tandon Ph.D. students. I have been privileged to mentor several assistant professors who are now highly successful tenured colleagues. I am happy to share my institutional knowledge about what it takes to be successful in our profession.
Research News
Usability study of wearable inertial sensors for exergames (WISE) for movement assessment and exercise
This research is led by Vikram Kapila, professor of mechanical and aerospace engineering. Principal authors are Ph.D. students Ashwin Rajkumar, Master's students Fabio Vulpi and Satish Reddy Bethi, and Preeti Raghavan of Johns Hopkins University School of Medicine and Rusk Rehabilitation at NYU School of Medicince.
Recent years have seen a brisk rise in development and deployment of digital health systems using such technologies as wearable sensors and embedded controllers to enhance access to medical diagnostics and treatments. Because of an accelerating trend in the number of stroke survivors requiring rehabilitation, healthcare services worldwide are considering technological solutions to enhance accessibility to assessment and treatment, particularly during the past year’s period of enforced quarantine due to COVID-19.
Some of the challenges faced by these technologies are clinical acceptance, high equipment cost, accuracy, and ease of use.
To address these limitations, the researchers designed wearable inertial sensors for exergames (WISE), a system that includes an animated virtual coach to deliver instruction, and a subject- model whose movements are animated by real-time sensor measurements from the WISE system worn by a subject. The paper examines the WISE system’s accuracy and usability for the assessment of upper limb range of motion (ROM).
The system uses five wearable sensor modules affixed to a user’s upper body: above the wrist on the left and right forearms, above the elbow on the left and right arms, and on the back. Each WISE sensor module consists of a sensor interfaced with a microcontroller soldered to a printed circuit board, which is connected to a lithium-ion battery. A storage and calibration cube is designed and 3D-printed to house the five WISE system modules and simultaneously calibrate all the sensors prior to placement on a subject. The microcontroller retrieves absolute orientation measurement from the sensor and wirelessly streams it to a computer. The investigators used a Unity3D-based exergame interface to animate the sensor data into a 3D-human model.
Seventeen neurologically intact subjects were recruited to participate in a usability study of the WISE system. The subjects performed a series of shoulder and elbow exercises for each arm instructed by the animated virtual coach; accuracy of the ROM measurements obtained with the WISE system were compared with those obtained with a system using the Microsoft Kinect markerless motion capture system (a platform used for exergames and often tested for rehabilitation capabilities). The results suggest the WISE system performs as well as Kinect.
The researchers plan future studies with patient populations in clinical and tele-rehabilitation settings.
This work is supported in part by the National Science Foundation DRK-12 Grant DRL-1417769, RET Site Grant EEC-1542286, and ITEST Grant DRL-1614085; NY Space Grant Consortium Grant 48240-7887; and Translation of Rehabilitation Engineering Advances and Technology (TREAT) grant NIH P2CHD086841.
A COVID-19 emergency response for remote control of a dialysis machine with mobile HRI
This research is led by Vikram Kapila, professor of mechanical and aerospace engineering. Principal authors are Ph.D. students Hassam Khan Wazir and Christian Lourido, and Sonia Mary Chacko, a researcher and recent Ph.D. graduate under Kapila.
Healthcare workers, at risk of contracting COVID-19 when in close proximity to infected patients, may transmit the virus to other hospital-bound patients, including those on dialysis. In order to circumvent this risk, the researchers proposed a remote control system for dialysis machines. The proposed setup uses dialysis machines fitted with robotic manipulators connected wirelessly to tablets allowing remote control by workers outside of patients’ rooms.
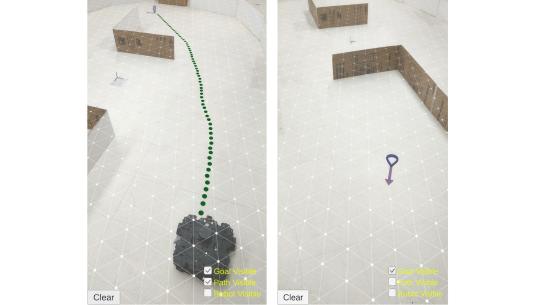
The system (see video here) comprises an off-the-shelf four degrees of freedom (DoF) robotic manipulator equipped with a USB camera. The robot base and camera stand are fixed on a platform, making the system installation and operation simple, just requiring the user to properly locate the robot in front of its workspace and point the camera to a touchscreen (representing a dialysis machine instrument control panel touchscreen) with which the robot manipulator is required to interact. The user interface consisting of a mobile app is connected to the same wireless network as the robot manipulator system. To identify the surface plane of action of the robot, the mobile app uses the camera’s video-feed which includes a 2D image marker located in the plane of the instrument control panel touchscreen, in front of the robot manipulator. The robotic arm can facilitate complicated sequences of button and slider manipulation thanks to a complex series of algorithms that automate some functions of the machine.
The machine attached to the already in-use dialysis machine livestreams data and results directly to a tablet or computer operated by a remote user in another room. Users tend to report a more consistent performance from the system when the user interaction is performed with a computer versus a tablet, though no significant difference has been recorded between the two modes of operation.
One of the most significant features of this new technology is that creating a custom user interface is not required to operate it, given that the user is interacting directly with the video feed from the instrument control panel touchscreen. Thus, the system works on any device with a touchscreen. The proposed device can be administered almost instantly, which can make it useful in an emergency situation. In the future, options of applying AR (augmented reality) features to the system in order to optimize user experience and efficiency may be explored.
This work is supported in part by the National Science Foundation under ITEST grant DRL-1614085, RET Site grant EEC-1542286, and DRK- 12 grant DRL-1417769.
Examining the effectiveness of a professional development program: Integration of educational robotics into science and mathematics curricula
This research was based on a program developed by Vikram Kapila, professor of mechanical and aerospace engineering.
Sparking interest in STEM education is a critical step toward creating a diverse workforce that can confer key advantages to any country in the global tech world. The number of US jobs required in STEM fields has increased nearly 34% over the past decade, but the number of students opting to pursue STEM as a major and career is declining. Many educators, researchers, and funding agencies have devoted significant efforts towards promoting students’ motivation and interests for learning and academic performance at all levels of STEM ecosystem to catalyze students’ entry on the pathways for STEM professions.
For students, robotics seems to be one of the best entryways to the field of engineering and STEM education in general. For example, students using a robot kit made by LEGO in a classroom can have a joyful and entertaining experience as they feel like playing with toys, which can encourage them to participate in robotic-based learning activities. Still, teachers can be reluctant. These programs can require specialized knowledge and teachers often do not have models or understanding of pedagogical approaches to implement technology-integrated courses, in general, and robotics-integrated courses, in particular.
A new study from Tandon researchers describes a professional development (PD) program designed to support middle school teachers in effectively integrating robotics in science and mathematics classrooms. The PD program encouraged the teachers to develop their own science and mathematics lessons, aligned with national standards, infused with robotic activities.
The study is based on a program developed by Vikram Kapila, Professor of Mechanical and Aerospace Engineering, and it involves Sonia Mary Chacko, a recent doctoral graduate from NYU Tandon. The lead author of the study, Hye Sun You, served as a research associate in the program and is now an Assistant Professor of Science Education at Arkansas Tech University. The study proposed that a multi-week summer PD and sustained academic year follow-up imparted to the teachers the technical knowledge and skills of robotics as well as an understanding of when and how to use robotics in science and mathematics teaching.
The 41 participants of study consisted of 20 mathematics and 20 science teachers and one teacher who teaches both subjects. Three instruments were administered to the teachers during the PD, and follow-up interviews were conducted to further examine benefits and possible impacts on their teaching resulting from the PD. The data were analyzed by both statistical and qualitative methods to identify the effectiveness of the PD.
This study found the technology integration of LEGO robotics tools has the potential to enhance teaching and learning, and that thoughtful PD programs and ongoing support for teachers can provide specific and practical ways to reduce the barrier to embedding technology in educational curricula. It is expected that the PD focused on improving teachers’ knowledge level, confidence, and attitudes towards technology helps teachers overcome barriers that make it difficult to integrate technology into their instruction and ultimately, transforms the performance of students by effective use of technology.
This work is supported in part by the National Science Foundation under ITEST grant DRL-1614085, RET 632 Site grant EEC-1542286, and DRK-12 grant DRL-1417769, and NY Space Grant Consortium grant 76156-10488.
Research Centers, Labs, and Groups