
The Secret's in the (Robotic) Stroke
NYU-Poly Researchers Tease Out Cues that Impact Schooling Fish Behavior
Brooklyn, New York— Recent studies from two research teams at the Polytechnic Institute of New York University (NYU-Poly) demonstrate how underwater robots can be used to understand and influence the complex swimming behaviors of schooling fish. The teams, led by Maurizio Porfiri, associate professor of mechanical and aerospace engineering at NYU-Poly, published two separate papers in the journal PLOS ONE.
These studies are the latest in a significant body of research by Porfiri and collaborators utilizing robots, specifically robotic fish, to impact collective animal behavior. In collaboration with doctoral candidate Paul Phamduy and NYU-Poly research scholar Giovanni Polverino, Porfiri designed an experiment to examine the interplay of visual cues and flow cues—changes in the water current as a result of tail-beat frequency—in triggering a live golden shiner fish to either approach or ignore a robotic fish.
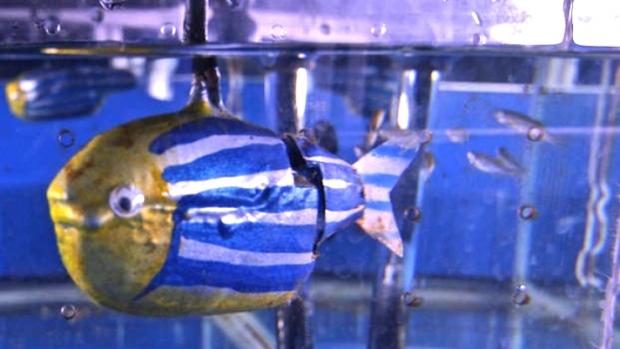
They designed and built two robotic fish analogous to live golden shiners in aspect ratio, size, shape, and locomotion pattern. However, one was painted with the natural colors of the golden shiner, the other with a palette not seen in the species. The researchers affixed each robot to the inside of a water tunnel, introduced a live golden shiner fish, and observed its interactions with the robot. While the robot’s position remained static, the researchers experimented with several different tail-beat frequencies.
“When the fish encountered a robot that mimicked both the coloration and mean tail-beat frequency for the species, it was likeliest to spend the most time in the nearest proximity to it,” Porfiri said. “The more closely the robot came to approximating a fellow golden shiner, the likelier the fish was to treat it like one, including swimming at the same depth behind the robot, which yields a hydrodynamic advantage,” he explained.
While flow cues created by tail-beat frequency proved to be a critical trigger for shoaling behavior, coloration proved slightly dominant. “Even at tail-beat frequencies that were less than optimal for the live fish, the shiners were always more drawn to the naturally colored robot,” Porfiri added.
Robot speed and body movement were the main focus of another study, also published in PLOS ONE, in which Porfiri teamed with NYU-Poly postdoctoral fellow Sachit Butail and graduate student Tiziana Bartolini. This time, the subject was the zebrafish, and the robot was a free-swimming unit with the coloration, size, aspect ratio, and fin shape of a fertile female member of the species.
The researchers placed the robot in a shared tank with shoals of live zebrafish, aiming to determine if the fish would perceive the robot as a predator, and whether visual cues from the robot could be used to modulate the fishes’ social behavior and activity. The team used a remote control to drive the robot in a circular swimming pattern, while varying its tail-beat frequency. For comparison purposes, they also exposed the fish to the robot in a fixed position, beating its tail.
Experiments showed that while the zebrafish clearly did not perceive the swimming robot as one of their own—they maintained greater distance from the robot than they did to each other—the robot was still an effective stimulus for modulating their social behavior. When the robot was held still in the tank, the live fish showed high group cohesion, along with a strong polarization—meaning the fish were likely to be close to each other and oriented in the same direction. As the robot’s tail-beat frequency increased, it had a profound impact on the group’s collective behavior, causing a spike in the cohesion and a small but detectable decrease in polarization—the fish largely milled together and even matched their speeds to that of the robot as it reached a certain tail-beat frequency.
“This shows us that the fish are responding to more than one stimulus—it’s not just the flow cues, it’s the combination of visual and flow cues that influence the collective response,” Porfiri said.
Porfiri is a leading researcher in the field of ethorobotics—the study of robot-animal interaction. Studies like these advance multiple areas of science, including the development of an experimental animal model based on lower-order species such as fish, with robots providing a consistent, infinitely reproducible stimulus. The use of robots to influence collective animal behavior is also viewed as a potential means to protect marine wildlife, including birds and fish, in the wake of environmental hazard.
This research was supported by the National Science Foundation and the Mitsui USA Foundation.


