
Dynamic Biped Robot Walking – Benefits of Reaction Wheel Actuation
Mechanical and Aerospace Engineering Department Seminar Series
Dynamic Biped Robot Walking – Benefits of Reaction Wheel Actuation
Jim Schmiedeler
Department of Aerospace and Mechanical Engineering
University of Notre Dame
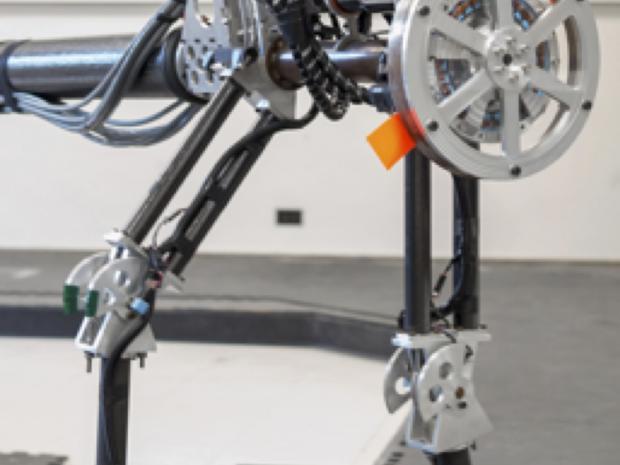
Humans carefully regulate their centroidal angular momentum when walking, with individual body segments providing opposing contributions to the small net angular momentum. When walking is perturbed, arm and torso accelerations can provide stabilizing torques that help prevent falls and return an individual to steady-state walking. Ideally, biped robots might exhibit these same characteristics to walk with both energetically efficiency and robustness to disturbances. Robot arm and torso motions, however, are often quite limited. Physical joint limits restrict accelerations to short periods of time that must be followed by rapid reversals of those accelerations. Such accelerations can also interfere with other tasks, such as carrying objects using the arms or terrain sensing with a vision system mounted to the torso. This talk presents research exploring how incorporating an actuated reaction wheel in a biped’s body can improve dynamic walking in terms of both efficiency and robustness. Reaction wheel actuation saturates at a maximum angular velocity rather than a joint limit and is entirely decoupled from other tasks. This work focuses specifically on an underactuated five-link planar biped with actuated hips and knees, but no ankle joints, and a reaction wheel mounted coaxial with the hips. For static balance, a task-space controller leverages the improved control authority offered by the reaction wheel to more rapidly stabilize the robot following disturbances. In steady-state walking, periodic actuation of the flywheel reduces the energetic cost of transport by decreasing joint motor work. Finally, for transient tasks such as changing speeds and step lengths, the reaction wheel expands the regions of dynamic feasibility. There is a weight penalty associated with the additional mass of the reaction wheel system, but the benefits presented in this talk motivate its use in underactuated bipeds.
Biosketch
Jim Schmiedeler is an Associate Professor in the Department of Aerospace and Mechanical Engineering at the University of Notre Dame. He received the B.S. degree from the University of Notre Dame and the M.S. and Ph.D. degrees from The Ohio State University, all in mechanical engineering. He was previously an Assistant Professor at the University of Iowa and at The Ohio State University and a summer faculty research fellow at NASA’s Jet Propulsion Laboratory. He is a recipient of the Presidential Early Career Award for Scientists and Engineers (PECASE) and a fellow of the American Society of Mechanical Engineers.