

Lecture: Tue 6 - 8.30pm, Rogers Hall, Rm 215
Instructor: Guido Gerig (gerig at nyu.edu)
Office: 2 MetroTech Center, 10.094. office hours Mon 3.30 to 5.30pm
TA: Rupanta Rwiteej Dutta (rrd300 at nyu.edu)
Guangqi Chen (gc1779 at nyu.edu)
Office hours: 2 MetroTech Center, 10th floor, cubicle space 10.098E (outside Gerig office)
Tuesdays 3-5pm (Rupanta Dutta), Thursdays 2-4pm (Guangqi Chen).
Material:
Primary Textbook, to be purchased by students: Computer vision: a modern approach, by Forsyth and Ponce. Prentice Hall, 2011 (or original 2002 version).
(Secondary Textbook: not to be purchased by students Book by Rick Szeliski).
The class will make use of MATLAB for projects. Students can also use of C++.
Prerequisites:
This course will focus on the 3D aspect of Computer Vision and thus focus on geometry and algorithms to computer the 3D scene from multiple images. We will use basic image processing but the necessary background will be introduced in class. This course introduces the many techniques and applications of computer vision and scene analysis. | Prerequisites: Graduate standing, CS-GY 5403 and MA-UY 2012, or equivalents, or instructor’s permission.
Syllabus (pdf document)
This course will use NYUClasses NYUClasses for organization of materials, exams, assignments, up- and downloads.
| Date |
Topic |
Slides |
Readings (files) |
Additional Materials |
Assignments |
| 24-Jan-17 |
Introduction, Organization Image Formation |
Introduction slides (pdf) |
Textbook Forsyth&Ponce: Book Contents (pdf) Image Formation: Ch1 Cameras (pdf) |
||
| 31-Jan-17 |
Image Formation |
Image Formation I: Cameras, Lenses, Sensors (slidesI, slidesII) |
Textbook Forsyth&Ponce: Image Formation: Ch1 Cameras (pdf) Geometric Camera Models CH 2 (pdf) |
||
| online |
Matlab/Octave Introduction |
Preparation
Matlab/Octave: (Credit for Matlab intro: Bo Wang and Avantika Vardhan, U of Utah), Octave Code: Rupanta Dutta |
Slides
pdf, Matlab code and images archive), Octave code (archive) |
Matlab
tutorial streaming video: vimeo page directly at
http://vimeo.com/105393037 |
|
| 07-Feb-17 |
Image Formation
ctd. Image Transformations, Lenses, Camera Calibration |
Image Formation II
(pdf) Lenses and Sensors (pdf) Camera Calibration (pdf) Radial Distortion Corr: (pdf) |
Geometric Camera Models: Old Book: Read 2.1, 2.2, 3.1-3.3, New Book: 1.2, 1.3 Part I: Image Formation: a) Intrinsic/Extrinsic Parameters, b) |
Camera Calibration
slides (intrinsic, extrinsic
parameters) S.M. Abdullah |
Assignment 1 out (see
NYUclasses) Due Wed Feb 22nd |
| 14-Feb-17 |
Stereo, Epipolar Geometry,Stereo
Essential and
Fundamental Matrices. Correspondence: Multiview stereo, Triangulation. |
Slides Stereo, Multiple View Geometry
I (pdf) Slides Multiple View Geometry II (pdf) |
Intro Stereo: New book: 1.13,
Old book: 1.2 New book: Ch7 Stereopsis Old Book: Ch10 and 11 |
||
| 21-Feb-17 |
Multiview Stereo, Rectification, Correspondences Triangulation, 3D Reconstruction |
Slides Multiple View
Geometry II (pdf) |
New book: Ch 7.4/7.5/7.6 Stereopsis Old Book: Ch 11.2/11.3/11.4 Old book: 11.1 and 10.1.4 (motions) New book: Ch7.2 and Problem 7.2 |
Assignment 2 out Wed 22-Feb (see NYUclasses) due Thu Mar 09 |
|
| 28-Feb-17 |
Multiview Stereo, Rectification, Correspondences Triangulation, 3D Reconstruction |
Slides Image Rectification
(pdf)
Slides Correpondences/Correlation (pdf) Stereo: Triangulation (pdf) |
see above |
Image Rectification (Trucco
& Verri Textbook)
(pdf) |
|
| 07-Mar-17 |
Midterm Exam 60 minutes POTENTIAL PROJECTS (slides) |
Materials covered: 1) Image Formation 1.1, 1.2, 1.3.1) Geometric Camera Calibration 7) Stereopsis: 7.1, 7.2, 7.4.1 |
|||
| 13-17 Mar 2017 |
NYU Spring Recess |
||||
| 21-Mar-17 |
Introduction: Reflectance
Maps, Shape from Shading Photometric Stereo (ctd) Shape from Shading: Surface Reconstruction |
Photometric Stereo
and Shape from Shading SfS: Slides G. Gerig Slides introduction (pdf) , SfS (pdf) |
New Book: Chapter 2 Old Book:: Chapters 4 and 5 Hands on Shape from Shading, Technical Report, May 2008 by Shireen Y. Elhabian (pdf) |
Additional materials/slides
Photometric Stereo and Shape fronm Shading (Ohad
Ben-Shahar BGU)
Slides Wolff JHU (pdf) Link to materials Wolff JHU (link) SfS via curve evolution (Kimmel, Siddiqi, Bruckstein): (pdf) |
|
| 28-Mar-17 |
Shape from Shading continued Optical Flow I |
see above Optical Flow (OF) I: Slides G. Gerig (pdf) additional handwritten notes (pdf) |
Hands on Shape from Shading, Technical
Report, May 2008 by Shireen Y. Elhabian (pdf) |
Assignment 3 out Tue 28-March, due Tue 11-April |
|
| 04-Apr-17 |
Optical Flow I Optical Flow II, Structure from Motion |
Optical Flow (OF) I: Slides
G. Gerig (pdf) Optical Flow II: Slides G. Gerig (pdf) |
Optical Flow: Computer
Vision Book (pdf) Original Paper Horn & Schunck 1981 (pdf) |
||
| 11-Apr-17 |
Optical Flow II, Structure from Motion Optical Flow III |
Optical Flow II: Slides
G. Gerig (pdf) Optical Flow: Structure from motion (see previous slides), additional handwritten notes on structure from motion (SfM) |
Optical Flow: Computer
Vision Book T&V (pdf) Original Paper Horn & Schunck 1981 (pdf) Optical Flow Computer Vision Book T&V Ch8 (pdf) |
CAP5415 - Computer Vision , Slides: Motion&Optical Flow |
Assignment 4 out Tue 11-April,
due Tue 15-April |
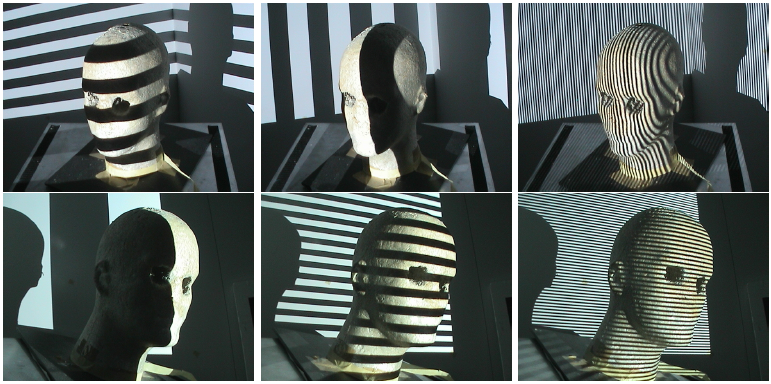
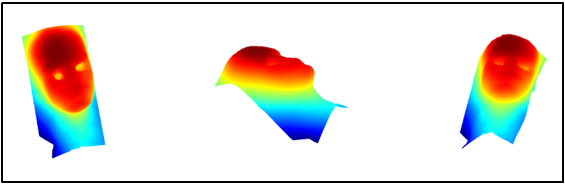
| 18-Apr-17 |
Structured Lighting I and II |
Structured Lighting I: Slides
G. Gerig (pdf) Powerpoint slides w. animations (ppt) Structured Lighting II cts. (pdf) |
Structured Lighting: Some
pages from Computer Vision
Book R. Klette (pdf) |
Build your own 3D
scanner: SIGGRAPH 2009 course:
D. Lanman/ G. Taubin Brown University: Notes pdf,
Slides Stanford, Levoy et al: Real-time 3D Model Acquisition (link) 3D photography on your desk: Bouget &Perona ICCV 1998: (pdf) * |
|
| 25-Apr-17 |
Shape from Silhouettes |
Shape from Silhouettes
I: Slides G. Gerig (pdf) Shape from Silhouettes II (Visual Hulls): Slides G. Gerig (pdf) Shape from Silhouettes III (Forbes): Slides G. Gerig (pdf) |
Marching Intersections (M.
Tarini (pdf)) Exact Polyhedral Methods (W. Matusik pdf ) Image-based Visual Hulls IBVH (W. Matusik, pdf) |
K. Forbes: Consistency Constraints
(pdf) K. Forbes: Uncalibrated, two planar mirrors (pdf) |
|
| 02-May-17 |
Last Class: Final Project Presentations Attendance of all for whole time required ! |
List of Projects () |
|||
| 10-May-17 |
Final Project Due |
Final Project Report Due |
Weighted
contribution of projects and exams to final grade:
