Joo H. Kim
,
Ph.D., ASME Fellow
-
Associate Professor

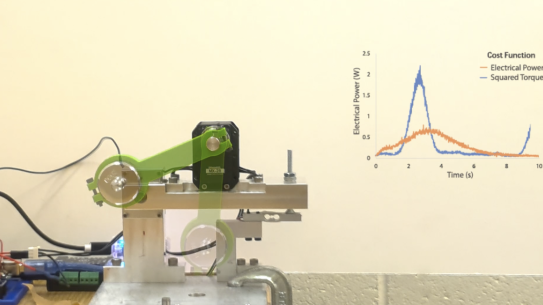
Dr. Joo H. Kim is an Associate Professor in the Department of Mechanical and Aerospace Engineering at New York University (NYU), core faculty of the NYU Center for Robotics and Embodied Intelligence (CREO), and affiliated faculty of NYU’s Center for Urban Science and Progress (CUSP) and NYU-KAIST Global Innovation and Research Institute. Dr. Kim directs the Applied Dynamics and Optimization Laboratory for the broad areas of dynamics, control, and optimization of mechanical systems. With applications in robotic and biomechanical systems, his current research topics include the energetics of dynamic systems, legged balance and gait stability, and integration of dynamics/control with numerical optimization and machine learning/AI. Dr. Kim’s research has been sponsored by NSF, NASA, NYU, industry, and international collaborators. He received a Ph.D. degree in mechanical engineering in 2006, and M.S. degrees in mathematics, mechanical engineering, and biomedical engineering, all from the University of Iowa, and a B.S. degree in mechanical engineering from Korea University, Seoul, South Korea. Before joining NYU in 2009, he was an Adjunct Assistant Professor of Mechanical Engineering and a Postdoctoral Research Scholar at the Center for Computer-Aided Design at the University of Iowa. Dr. Kim is a Fellow of ASME and a Senior Member of IEEE. His current and past roles as an Associate Editor include the ASME Journal of Mechanical Design, the ASME Journal of Mechanisms and Robotics, and the Conference Editorial Board of the IEEE Robotics and Automation Society. Dr. Kim is the recipient of several awards and honors, including the 2007 Top Government Technology of the Year Award from the State of Iowa, the 2014 Advanced Modeling and Simulation Best Paper Award from the ASME Computers and Information in Engineering Division, the 2015 Freudenstein/General Motors Young Investigator Award from the ASME Design Engineering Division, and the 2020 Associate Editor Award from the ASME Journal of Mechanical Design.
Education
Korea University, 1998
Bachelor of Science, Mechanical Engineering
University of Iowa, 2000
Master of Science, Biomedical Engineering
University of Iowa, 2005
Master of Science, Mechanical Engineering
University of Iowa, 2005
Master of Science, Mathematics
University of Iowa, 2006
Doctor of Philosophy, Mechanical Engineering
Experience
New York University, September 2015 to present
Associate Professor, Department of Mechanical and Aerospace Engineering
New York University, December 2025 to present
Core Faculty, NYU Center for Robotics and Embodied Intelligence (CREO)
New York University, January 2023 to present
Affiliated Faculty, NYU Center for Urban Science and Progress (CUSP)
New York University, October 2023 to present
Affiliated Faculty, NYU-KAIST Global Innovation and Research Institute
New York University, December 2011 to present
Associated Faculty, Department of Physical Therapy, NYU Steinhardt
New York University, August 2009 to August 2015
Assistant Professor, Department of Mechanical and Aerospace Engineering
University of Iowa, July 2008 to July 2009
Adjunct Assistant Professor, Department of Mechanical Engineering
University of Iowa, August 2006 to July 2009
Postdoctoral Research Scholar, Center for Computer-Aided Design
Publications
Please see the publication list in the Applied Dynamics and Optimization Laboratory website or Google Scholar webpage.
Awards and Honors
• 2025 Elected, Fellow of ASME
• 2025 Distinguished Overseas Scholar, recognized and invited by KAIST's College of Engineering (Daejeon, Republic of Korea) for visit to the Department of Mechanical Engineering
• 2024 NYU School of Engineering Service Award
• 2020 Associate Editor Award, ASME Journal of Mechanical Design
• 2020 Elected, Senior Member of IEEE
• 2019 NYU School of Engineering Service Award
• 2015 Freudenstein / General Motors Young Investigator Award, ASME Design Engineering Division
• 2014 NYU School of Engineering Service Award
• 2014 Advanced Modeling and Simulation Best Paper Award, ASME Computers and Information in Engineering Division
• Certificate of Appreciation for outstanding service, ASME 2012 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference, ASME Design Engineering Division
• 2007 Prometheus Awards Top Government Technology of the Year, The Technology Association of Iowa, State of Iowa
Research Centers, Labs, and Groups



NYU Center for Robotics and Embodied Intelligence (CREO)
We strive to advance research, education, and innovation at the intersection of AI and robotics to enhance everyone’s quality of ...