Illustrative videos for monitoring, commanding, and controlling laboratory testbeds using iPhone, iPod, and iPad over an ad hoc Wi-Fi network
Jared Alan Frank, David Lopez, and Vikram Kapila
Compatible Browsers: Safari(5.0.2 & up) ; Firefox(19.0.2 & up) ; IE(9 & up) ; Chrome(26.0.1410.64 m & up)
Click HERE to view it on vimeo.com
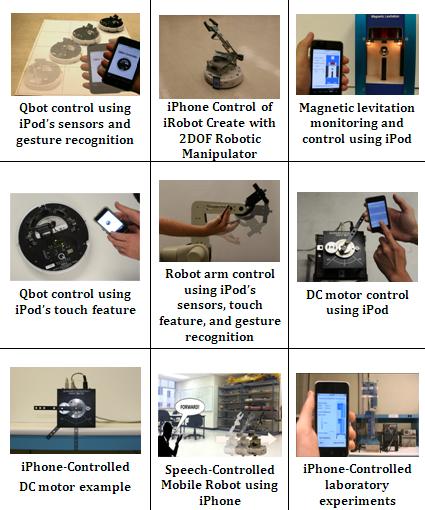
This video shows a Qbot mobile robot (based on iRobot’s Create platform) being commanded by an iPod Touch held in a user’s hand. As the hand is tilted forward and tuned to the right, the iPod’s accelerometer data is used to command the Qbot to move forward and turn to the right, respectively. Alternative iPod interfaces allow the Qbot to be commanded to a specified position on the grid. Image Credit: Jared Alan Frank and David Lopez.
Compatible Browsers: Safari(5.0.2 & up) ; Firefox(19.0.2 & up) ; IE(9 & up) ; Chrome(26.0.1410.64 m & up)
Click HERE to view it on vimeo.com
This video shows a Qbot mobile robot (based on iRobot's Create platform) being commanded by an iPod Touch held in a user's hand. As the user touches various locations on the grid of the iPod graphical user interface, the Qbot in the physical world is commanded to the corresponding location. Image Credit: Jared Alan Frank.
Compatible Browsers: Safari(5.0.2 & up) ; Firefox(19.0.2 & up) ; IE(9 & up) ; Chrome(26.0.1410.64 m & up)
Click HERE to view it on vimeo.com
This video shows a iRobot Create with a 2 DOF robotic manipulator being commanded by an iPod touch held in a user's hand. The user can use touch, sensor, and gesture recognition capabilities of the iPhone to command the mobile robot and the manipulator. Image Credit: Jared Alan Frank.
Compatible Browsers: Safari(5.0.2 & up) ; Firefox(19.0.2 & up) ; IE(9 & up) ; Chrome(26.0.1410.64 m & up)
Click HERE to view it on vimeo.com
This video shows a wrist-joint of a 5 degree-of-freedom robotic manipulator being commanded by an iPod Touch held in a user’s hand. As the hand is tilted forward and backward, the iPod’s accelerometer data is used to command the wrist-joint to tilt forward and backward, respectively. The same iPod interface allows the user to command the other 4 degrees-of-freedom as well. Image Credit: Jared Alan Frank and David Lopez.
Compatible Browsers: Safari(5.0.2 & up) ; Firefox(19.0.2 & up) ; IE(9 & up) ; Chrome(26.0.1410.64 m & up)
Click HERE to view it on vimeo.com
This video shows a magnetic levitation experimental testbed being commanded using an iPod Touch. The user commands the position of the ball using a slider at the bottom of the iPod graphical user interface (GUI). The measured position of the ball is communicated to the GUI in real-time, displayed in a textbox, and used to animate the ball position on the GUI. Alternative iPod interfaces allow the user to manipulate gains of an algorithm controlling the ball position. Image Credit: Jared Alan Frank and David Lopez.
Compatible Browsers: Safari(5.0.2 & up) ; Firefox(19.0.2 & up) ; IE(9 & up) ; Chrome(26.0.1410.64 m & up)
Click HERE to view it on vimeo.com
This video shows a DC motor position control experimental testbed being commanded using an iPod Touch. The user commands the position of the DC motor using a slider at the bottom of the iPod graphical user interface (GUI). The measured position and velocity responses of the motor is communicated in real-time to the GUI and plotted in the two graphs shown. Alternative iPod interfaces allow the user to manipulate gains of an algorithm controlling the DC motor position. Image Credit: Jeffrey S. Bernhardt and Hilary Mallar.
Compatible Browsers: Safari(5.0.2 & up) ; Firefox(19.0.2 & up) ; IE(9 & up) ; Chrome(26.0.1410.64 m & up)
Click HERE to view it on vimeo.com
This video demonstrates the use of a multimodal interface on iPhone to monitor and command the position of a DC motor. The user may command the position of the motor by manually inputting the angle into a text box, using buttons and sliders, using the iPhone’s on-board accelerometer, or using touch gestures to interact with an animation of the motor. The user may also tune the controller gains in order to change the dynamical behavior of the motor. A real-time plot of the sensor data is provided at the bottom of the interface. The animation of the motor updates in real-time and reflects the position of the actual motor. Image Credit: David Lopez.
Compatible Browsers: Safari(5.0.2 & up) ; Firefox(19.0.2 & up) ; IE(9 & up) ; Chrome(26.0.1410.64 m & up)
Click HERE to view it on vimeo.com
This video demonstrates the use of an iPhone to command the motion of a differentially-driven mobile robot by speaking commands into the iPhone’s microphone. The user may command the robot to drive forward or backward, rotate clockwise or counter-clockwise, or to open or close the gripper arm. A text-to-speech synthesizer is used to provide the user with voice responses. Image Credit: Jared A. Frank.
Compatible Browsers: Safari(5.0.2 & up) ; Firefox(19.0.2 & up) ; IE(9 & up) ; Chrome(26.0.1410.64 m & up)
Click HERE to view it on vimeo.com
This video, which was submitted to the Simulink Student Challenge, demonstrates the use of iPhone applications in order to monitor, command, and control a variety of commercially-available laboratory experimental test beds. Real-time plots of sensor data as well as animations of the experiments are provided to the user. Image Credit: Jared A. Frank.