Magnetic Levitation System
Brief description:
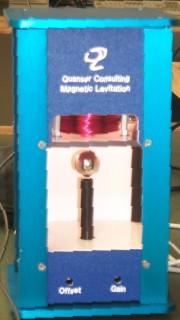
In this experiment, a steel ball is levitated using the force generated by an electromagnet (see the picture below). The “maglev” system consists of an electromagnet, a ball rest, a ball position sensor, and a steel ball. It is completely encased in a rectangular enclosure divided into three distinct vertical chambers. The upper chamber houses an electromagnet such that one pole of the electromagnet is exposed to the middle chamber and faces a black post erect in the middle chamber. The post is designed such that with a 2.54 cm steel ball at rest on its surface, the top of the ball surface is 14 mm from the face of the electromagnet. The middle chamber is illuminated using two light bulbs. The ball elevation from the top face of the post is measured using a sensor embedded in the post. The bottom chamber houses sensor and signal conditioning circuitry. The objective of this experiment is to design a controller that levitates the steel ball from the post and makes it track a specified position trajectory.
Usage:
Undergraduate controls laboratory, design projects in graduate controls-oriented courses, and graduate student research.
Past experience:
In previous years, students have designed and implemented classical, PI and PID controller; LQR-based, linear controller; pole-placement controller; etc.
Future Plans:
Develop full nonlinear system dynamics and design and implement nonlinear controllers (e.g., feedback linearization, backstepping, nonlinear output feedback control, etc.).
Supplier:
Quanser Consulting Inc.