1-D Inverted Pendulum on the Cart
Brief description:
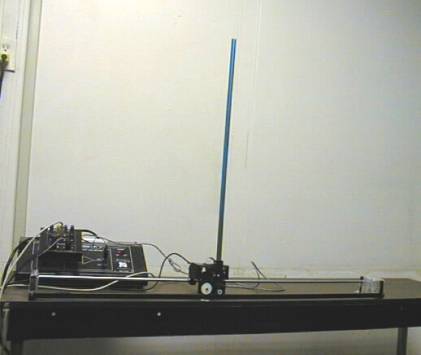
In this experiment, a pendulum is attached to a cart that is powered by a DC motor. The cart moves on a rectilinear track. The inverted position of the pendulum is inherently unstable in the absence of control. A control law for cart motion is to be designed to stabilize the pendulum in the inverted position. Occasionally, we may demand the cart to track a specified position with pendulum in the vertical-upright position. Other interesting issues may include e.g., swing-up control (where the pendulum starts in the vertical-down position and is brought into the vertical-upright position by control action).
Usage:
Design projects in graduate controls-oriented courses.
Past experience:
In previous years, students have designed and implemented PID controller; linear quadratic regulator; observer-based, pole placement controller; reduced-order, observer-based, pole placement controller; linear quadratic Gaussian controller; switching-based, swing-up controller; etc. The setup has also been used as a servo control testbed (i.e., with only the cart on the rectilinear track) and as a 1-D gantry.
Future Plans:
Energy-based (passivity-based) control, nonlinear switching control, etc.
Supplier:
Quanser Consulting Inc.