Methodology
The chassis was made with a
circular base with platforms for extra components such as infrared sensors, the
holding tank for the polyurethane, and the polyurethane dispenser attached to
the back of the robot. The wheels were aligned similar to the boe-bot chassis made by Parallax Co, with two wheels
attached to servo motors in the front and a ball type wheel in the back for
support.
The programming of the robot involved using
infrared sensors to detect obstacles and walls while moving the robot in a row
by row pattern to ensure a good polish job (fig.1). The challenge exists mainly
in getting every square inch covered, because as the robot turns, it left a
little wedge uncovered. So the robot was first programmed to implement a wall
following program to cover up the missed edges (fig.2).
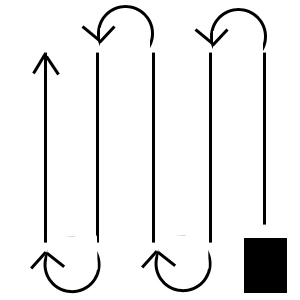
Fig.1 180 degree turns, Area cover program
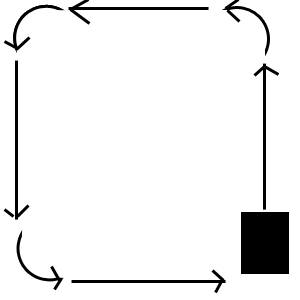
Fig.2 90 degree turns, Wall-follow program
To test an autonomous robot, it would make
sense to have obstacles; however, because the robot is a floor polisher,
circumstances had to be considered: all movable furniture were
removed from area prior to polishing even when people were manually applying
the polyurethane. So basically the only obstacles needed to be avoided were the
walls and maybe some occasional poles and steps. Because the test model was
small, the area for testing was also reduced to a topless box-type arena with few
obstacles. Since using actual polyurethane is expensive and hazardous, caro syrup, a liquid of similar viscosity, was used to
mimic polyurethane.